Point clouds are a powerful way to represent a whole object, scene or structure. When colour information is added, the point cloud becomes even more powerful, presenting data collected in 4D. They aren’t new and have been around since the 1960s.
In technical terms, point clouds are datasets that correspond to objects or space. These points represent X, Y, and Z geometric coordinates of a single point on a scanned surface. Millions of points are created when scanning even the smallest of objects. Over time, the use of point clouds has grown as the scanning technology that creates them has matured, and cloud-based software has emerged to manage and control their vast size.
How is a point cloud created?
Point clouds are usually generated using LiDAR (light detection and ranging) technology and techniques. These scans are combined and stitched together to create a complete picture of a scene, using a process called ‘registration’. The registration process can vary dramatically depending on the type of scanner and other data inputs used.
We are at a tipping point on how scanners will be used. Cost-effective drone, portable, and robotics-based scanners are creating new inputs to 3D reality capture. As a result, multi-scanner workflows are now becoming critical to enable the most suitable scanner to be deployed at the right time within a single operation.
There are two main categories of scanner:
1. Mobile mapping (including aerial, vehicle and wearable scanners)Mobile mapping systems (MMS) provide fast and flexible reality capture, more so than static scanners, making them ideal for taking a high volume of scans in a shorter time frame.
There are three main components in MMS:
- Camera(s)
- LiDAR
- Positioning system (e.g. SLAM, IMU, GNSS, or a combination)
MMS has been traditionally thought of as laser sensors mounted on cars or aircraft capturing vast terrains. However, SLAM is increasingly being deployed in mobile 3D laser scanning, using wearable MMS types such as trolleys or backpacks.
2. Terrestrial laser scanners
Terrestrial laser scanners (TLS) are the workhorses of reality capture, particularly when you need engineering-grade measurements. These are the scanners able to deliver scene coverage and high-detail accuracy.
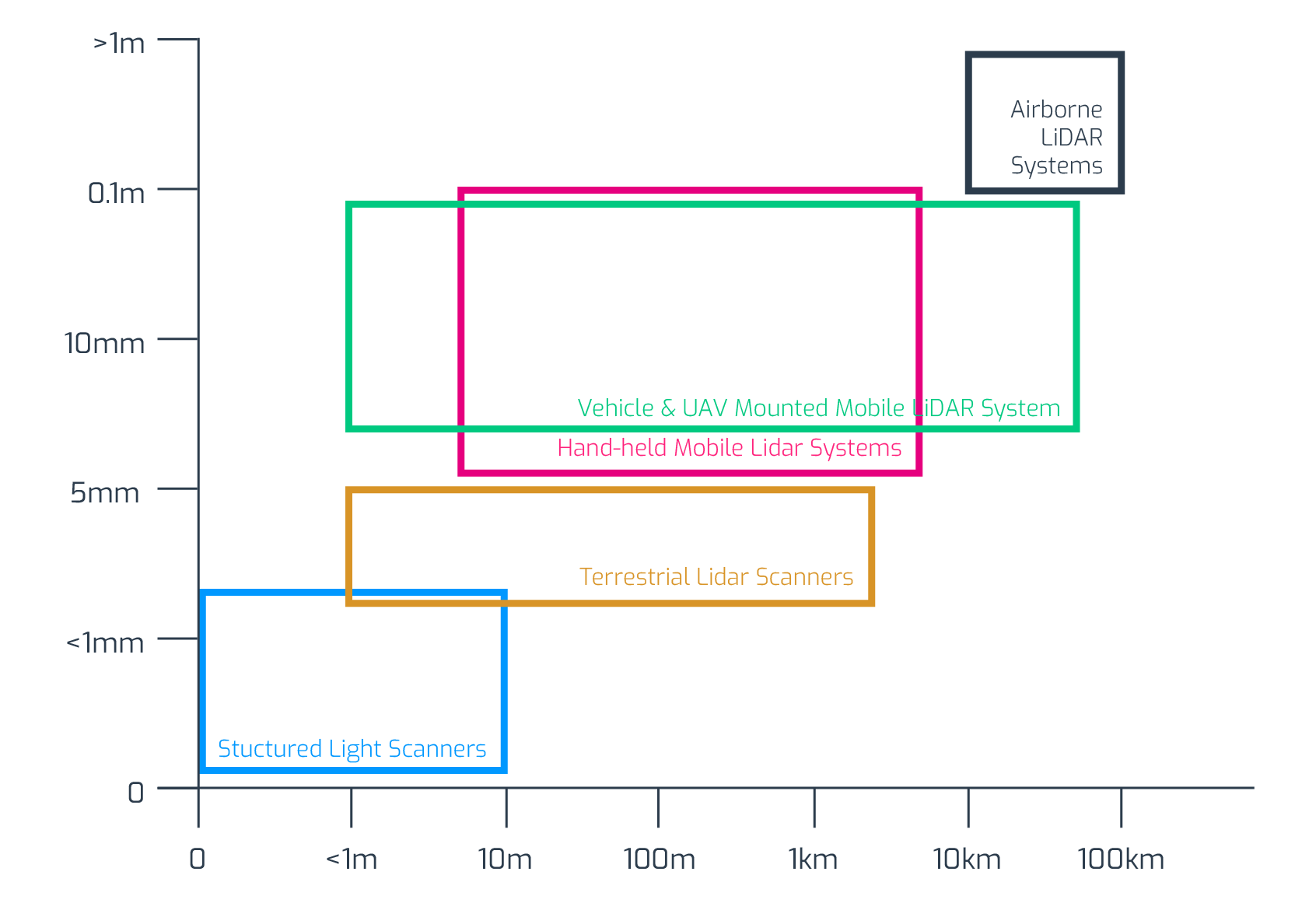
The chart below shows a bit more about the different types of scanners available, where they work best and where they overlap.Each type of scanner has a particular use case. At the extremes of very high accuracy or vast range — your decisions are made for you — the middle ground is becoming less clear cut.
Single vs multi-scanner data sets
The process of choosing your scanner is going through a bit of a revolution. The terrestrial laser was once the instrument of choice, but the focus now is on choosing the right type of scanner to create the best outcome. Basically, you now need to align use cases to scanners.
Below is a typical approach to deciding whether you need single or multi-scanner data sets.
- Understand the scanning needed to get the job done.
- Figure out whether you have the types of scanners that will best work together.
- Create a workflow that matches the scanners to the jobs needed.
- Make sure you have the software and registration processes to accomplish this.
Remember, your ability to make this kind of workflow possible has more to do with your software choices than the scanners you deploy.

Point cloud registration
The primary factor in acquiring point cloud data is the access/visibility of the surfaces to be scanned. In most cases, you need visible access for point clouds to be obtained. No matter the scanner technology used, covering all scanning positions will take time and many scans. Aligning scans taken from all these positions can also be a problem.
Originally, you attempted to align scans by setting and moving targets — very laborious and constrained by where you could put the targets and when.
A more elegant approach was to produce overlapping target-less scans and perform the manually intensive task of combining and cross-checking scans on a computer back at the office. However, any time saved in the field by avoiding target placement was eaten up by time spent in the office.
Historically, the idiosyncrasies of scanners also meant that, most often, you needed to use proprietary software. Fortunately, this is no longer the case because LiDAR scanning hardware is now mature and stable. As in most industries, more mature hardware leads to an upsurge in innovative, usually cloud-based, software.
At Vercator, we developed our multi-stage vector analysis to do away with the need for artificial targets. And we embraced the cloud to take advantage of the parallelisation of computing power and the automation of processes.
The difference between disk-based and cloud-based results are spectacular. But that’s not all. Cloud-based registration has led to innovations such as:
- The ability to engage in multi-scanner workflows.
- Easier collaboration and information sharing.
- The move to automated data classification.
- Visualisation and colour animation using HD photography.
Suggested reading: If you want to learn more about point cloud software, take a look at our blog — Point Cloud Mapping Software Features to Look for in 2021
How are point clouds used?
Point clouds have generally been used to create a 3D model. However, there are many variations in how those models are used. And as we alluded to in use cases, what you want to achieve with your model will impact the specifics of the point cloud you need to create.
Here are the three typical use cases (but be aware, more are evolving):
- Graphic modelling: To show to clients and enable remote collaboration. Characterised by low accuracy point clouds designed to illustrate plans or review a space, these are often created using mobile mapping or SLAM
- Engineering-grade measurements: To make remote measurements of a scene and enable fewer site visits during planning. Characterised by the need for high-quality scans produced by TLS (along with multi-sensor workflows).
- Large-scale cartography: Mapping on a large scale. Many use cases are developing here, often carried out with drones and mobile mapping.
It’s worth noting that for both the graphic and engineering cases, the use case can be applied just as well to objects as buildings or scenes, so we are seeing point clouds being used in manufacturing contexts.
In addition to creating a 3D model, early scans can also help identify site-specific or geographical risks and enable mitigations to be carried out accordingly. In hazardous environments, this can significantly improve workforce safety.
Industries pioneering point cloud adoption
As they become more flexible and accessible, point clouds are becoming more relevant in a wide range of sectors and application areas. Data availability, accuracy, density, and size of 3D point clouds are forecast to vastly increase the use of point clouds in the next few years.
Although point clouds are used in many contexts, there are a few stand out sectors.
- Architecture: Used extensively in renovations and restorations — now being increasingly deployed as a real-world reference for new builds.
- Construction: Applied throughout a project from site survey to design, build and maintenance — either for existing buildings or new projects.
- Mining: Supporting sustainability, cost efficiencies and safety — especially in the fields of mining robotics and on-site automation.
- Civil engineering: Finding applications in urban planning, structural health monitoring, flood risk and landslide analysis.
Underpinning point cloud adoption in all sectors is the need to capture, standardise, update and share site information. Many sectors are turning to BIM (Building Information Modelling) to realise the value of their point clouds.
BIM fundamentally is the digital representation of the physical and functional characteristics of a project. Point clouds bring BIM in touch with physical space and let you import 3D physical space (known as Scan-to-BIM) into a digital format to inform/augment existing models.
Looking to the future of point clouds
Point clouds are changing the world, bridging the gap between physical and digital spaces. The wide-scale adoption of scanning technologies and reality capture brings the combined promise of flexibility and efficiency to many industries.
Making the automation of multi-scanner point cloud processing a reality is our central goal at Vercator. Our vector-based, multi-stage and cloud-ready processing algorithms make it possible to transform workflows, classification and use cases. If you want to see what Vercator can do for you, sign up for a free trial today.
Additional reading: To read more about the evolution of point clouds, check out our eBook — Point Cloud Processing Has Changed